近日,中國科學技術大學工程科學學院、人形機器人研究院李木軍副教授、張世武教授,聯合生命科學與醫學部胡兵教授,提出了一種新型多孔磁性軟體抓手(PMSG),通過在柔性磁性硅膠中融入多孔設計,使得PMSG能夠迅速且安全地抓取脆弱的生物活體。成果以“Porous Magnetic Soft Grippers for Fast and Gentle Grasping of Delicate Living Objects”為題發表在國際期刊《先進材料》上。
磁性軟體抓手因其操作靈活、反應迅速,并且對生物體安全而備受矚目。它們特別適合用來精細地處理那些脆弱的生物體。然而,如何在操作過程中不傷害這些生物體,一直是科研人員面臨的一個挑戰。針對上述挑戰,研究團隊提出通過將多孔結構引入磁性硅膠彈性體制造PMSG的方法,使其具備高磁化、低模量和粗糙表面特點,從而展現卓越的柔軟度和適形性,同時在快速抓取時減少對物體的沖擊。這種簡單有效的方法為高性能致動器與生物的安全交互提供了全新的思路。
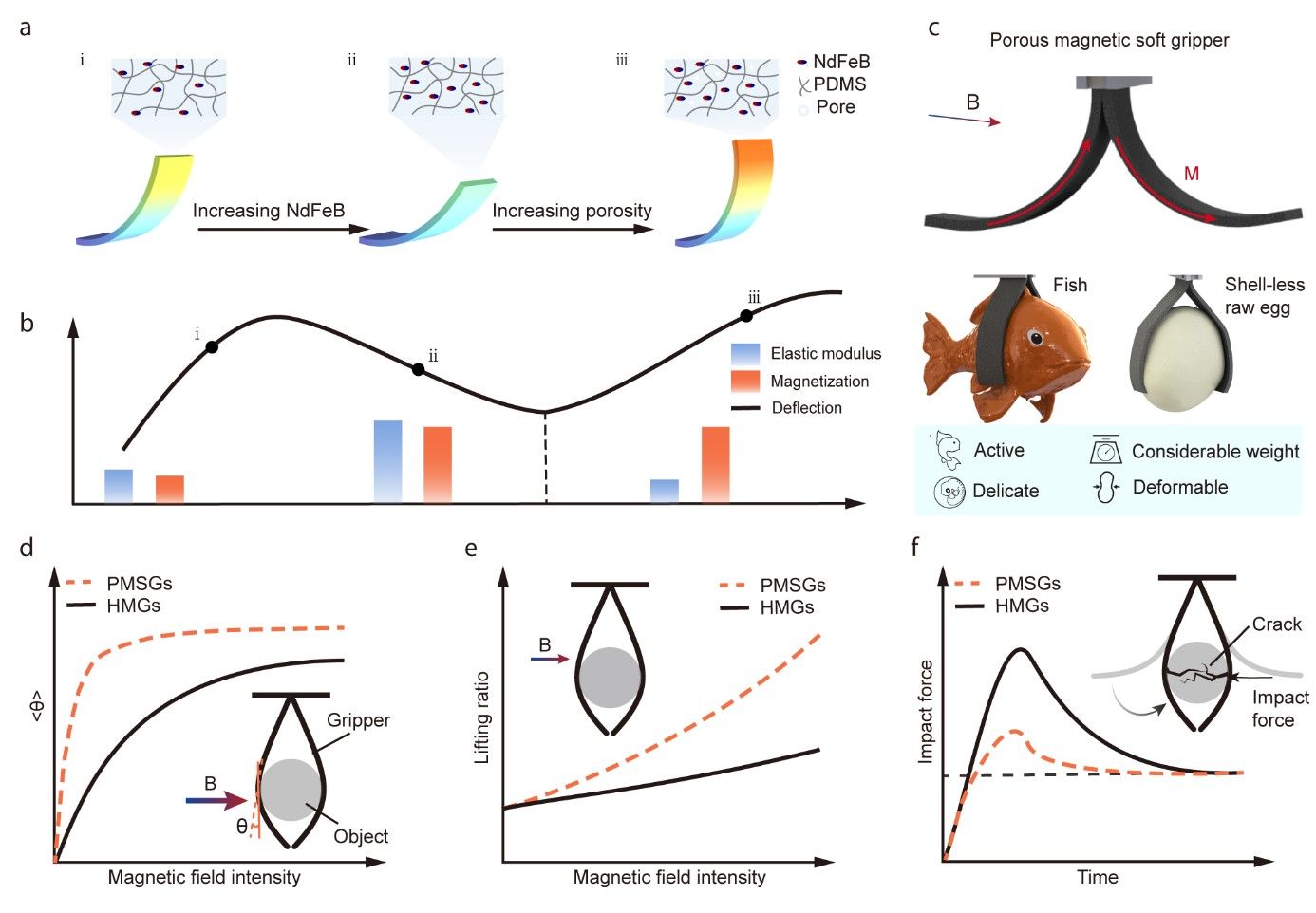
圖1.多孔磁軟體抓手設計
研究團隊提出的多孔磁性軟體抓手憑借其多孔結構,展現出卓越的柔軟度和適形性,能夠輕松抓取各種大小和質地的物體。這種軟抓手的靈活性使其能夠適應復雜或形狀不斷變化的物體,提供了比傳統機械抓手更可靠的抓取方案,特別是在處理形狀不規則或容易變形的物體時更為有效。由于具備高磁化強度和低彈性模量,能夠迅速對磁場變化作出反應,同時保持較小的沖擊力,確保安全地抓取易碎物品,如能夠快速安全抓住上拋的去殼生鵪鶉蛋。此外,多孔磁性軟體抓手在生物醫學領域,尤其是細胞操作方面,展現出巨大的應用前景,因為它能夠提供持續而溫和的壓力,確保對生物樣本的輕柔與安全抓取,為醫療微操作器械的創新提供了新的可能性。

圖2.軟體抓手的多功能性展示(a)抓取薄板和細線(b)抓取魚和蒲公英(c)快速抓取去殼生蛋(d)安全移取斑馬魚卵
此外,研究團隊還進一步開發了可遠程操作的多孔磁性軟體抓手,克服了傳統磁驅動抓手對大型電磁場線圈的依賴,更有利于與移動平臺相結合,從而適用于更廣泛的應用場景。所設計的抓手能夠與移動機器人集成,實現對小雞的溫和抓取與定點移動。同時,該軟體抓手還可與無人機集成,可以捕獲水中的小魚,并能迅速地將它們進行遠距離的安全轉移。這些結果表明,多孔磁性軟體抓手在未來的野外生物樣本收集和生物醫學研究中將發揮更加重要的作用。

圖3.抓手與移動平臺集成,實現生物活體遠程抓取
以上工作得到了科技部國家重點研發計劃,安徽省自然科學基金,“科大新醫學”聯合基金支持。中國科學技術大學精密機械與精密儀器系博士生李幸響、生命科學與醫學部博士生凡定剛、精密機械與精密儀器系博士后孫宇軒為該論文共同第一作者,中國科學技術大學李木軍副教授、張世武教授、胡兵教授為該論文通訊作者。
論文鏈接:https://doi.org/10.1002/adma.202409173
(工程科學學院、人形機器人研究院、科研部)

